浙江大学机器学习课程Part2
浙江大学机器学习课程Part2——支持向量机
[TOC]
Support Vector Machine
支持向量机
对样本数较少的时候,都会得到一个比较好的结果。
如何在两种训练集上画一条直线来分类:
- 线性可分(Linear Separable)训练样本集
- 非线性可分(Non-Linear Separable)样本集
将线(在多维特征下是超平面Hyperplane)向两边移动直到擦到样本点,其中间隔(Margin)最大,且线在d/2处。
数学描述
- 将平行线擦到的向量称作支持向量(Support Vector)
- 训练数据及标签:(Xn, Yn)…… X为特征向量,Y为标签。Y取+1或-1来表示,方便推导。
- 线性模型:(W, b) 超平面:Wt * X + b = 0
机器学习过程
- 用复杂的函数来限定模型框架
- 留出待定参数
- 用训练样本来确定参数取值
线性可分的定义和条件
{(Xi, Yi)}i = 1N, 存在(W, b), 则对任意 i = 1N. 有:
①若Yi = +1, 则 Wt * X + b > 0
②若Yi = -1, 则 Wt * X + b < 0
为什么要取Y=±1?因为可以得到①②等价于 Yi ( Wt * X + b ) > 0
优化问题(优化目标函数和限制条件)
两个要点
- 点最小化(Minimize / min): 1 / 2 * ||W||² 。这里1/2只是为了求导方便
- 限制条件(Subject to / s.t.): Y
i( W^T^ * X + b ) ≥ 1, (i=1~N)
两个事实
事实1:W^T^ * X + b = 0 与 a * W^T^ * X + a * b = 0, (a∈R+) 是同一个平面。
即: 若 (W, b) 满足 W^T^ * X + b = 0 , 则 (a * W, a * b) 也满足 W^T^ * X + b = 0
事实2:向量到超平面(点到平面)的距离公式。d = | Wt * X0 + b | / || W || *1.这里的X0代表的是包含多个维度的坐标[x,y,z…],而Y0是分类标签,不能与坐标混为一谈;2.WtX0结果是一个数而不是矩阵向量**
其中,模 || W || = √(W1²+W2²…+Wn²)
推导
- 用a去缩放超平面参数:(W, b) <=> ( a * W, a * b )。根据事实1,这两组不同的参数代表的是同一个平面。
- 最终使在支持向量上:| W^T^ * X
0+ b | = 1。这里的W和b都是经过系数a缩放过后的,目的是为了凑出1(当然你可以凑出任意常数),而a具体是多少,我们不需要关注。需要注意的是,这里只是带入支持向量的值,并不是指支持向量的那个点在超平面上,否则值为0。 - 由推导2和事实2可得:d = | W^T^ * X
0+ b | / || W || = 1 / || W ||。可得要点1:最小化 ||W|| 即最大化 d 。 - 其他不是支持向量的点到超平面的距离,则大于 1 / || W || 。可得 | W^T^ * X
0+ b | > 1 。可得要点2:限制条件 Yi* ( W^T^ * X + b ) ≥ 1
举例:原来平面是 W^T^ * X + b = 0 , 假设带入X0后的值 | W^T^ * X0 + b | = M , 现在把超平面缩放为 a * W^T^ * X + a * b = 0 , 其中a是1/M, 那么把X0带入则 | a * W^T^ * X0 + a * b | = M/M = 1。与此同时,计算d的时候,因为分子分母同乘a=1/M,a不需要求出,所以我们不需要关心a的取值,只是为了凑一个 | W^T^ * X0 + b | = 1 ,当然你可以凑出任意常数。
二次优化问题(Quadratic Programming)
二次优化问题属于凸优化问题
- 目标函数(Obejective Function)是二次项
- 限制条件是一次项
要么无解,要么只有唯一极值。即局部极值就是全局极值。
SVM处理非线性
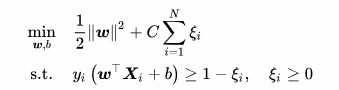
处理这种问题的一种方案就是加上正则项(Regulation Term)(结构损失函数),在解集合中挑选出一组参数(解),使经验损失和结构损失都较低。
c是正则化的强度,是事先设定好的超参数。
ζ是松弛变量(Slack Variable)。
放到场景中就是,样本数小于参数量,在只优化经验误差函数的时候很容易发生过拟合。这个公式依然可以适用于处理线性Linear SVM。
低维到高维映射
在低维空间中,一些线性不可分的数据集,在高维空间中,更有可能被分开。因此可以把Xi通过函数φ(x)变换映射到高维空间,通过泛函分析满足某种条件,把核函数W*φ(x)拆成两个高维向量的内积。
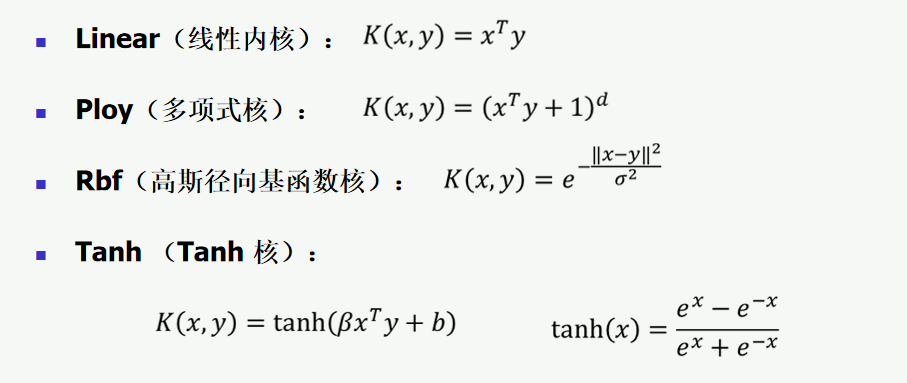
核函数
我们可以不在意无限维映射φ(x)的显示表达,我们只要知道一个核函数(kernel Function), ,则优化问题仍然可解。
,则优化问题仍然可解。
线性内核相当于没有用核。多项式核的待定系数d取越大,则越复杂。高斯核是无限维度,分类效果最高,待定系数为σ。Tanh核的待定参数是β和b。这些待定参数的选取只能不停地试。
充要条件
能够成立的充要条件:(Mercer’s Theorem)
- K(X
1, X2) = K(X2, X1) (交换性) - 对任意 常数C
i, 向量Xi(i=1N),有 ∑(i=1N) ∑(j=1N) Ci~ * Cj* K(Xi, Xj) ≥ 0 (半正定性)
原问题和对偶问题==(重点复习)==
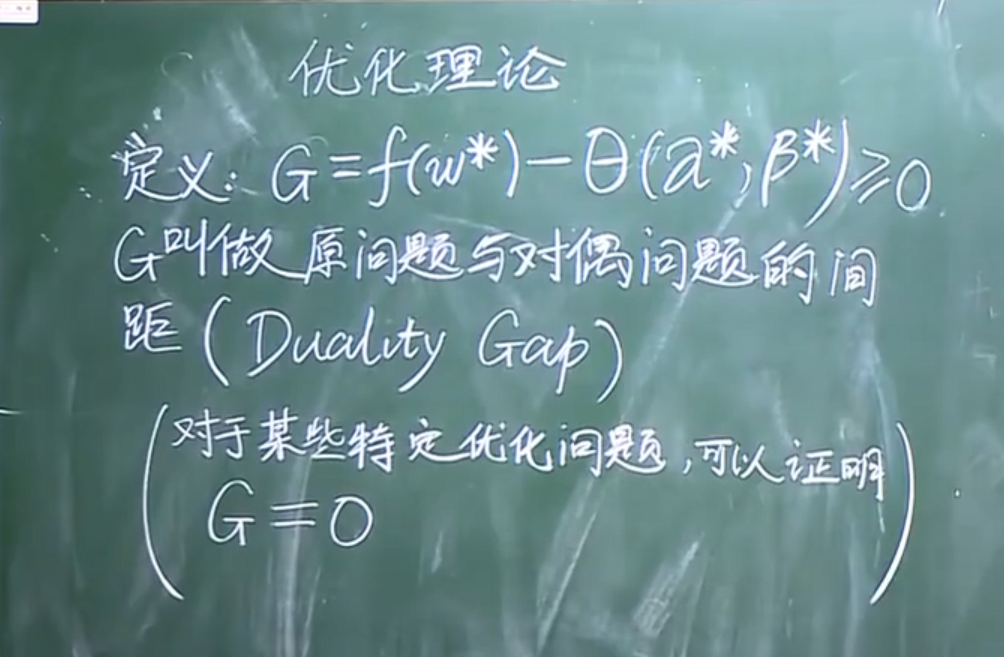
优化理论
优化理论(运筹学)是工程里最本质的问题
推荐书籍
- Convex optimization - Stephen Boyd - b站吴立德
- Nonlinear Programming
原问题(Prime Problem)
min: f(w)
s.t. : gi(w)≤0 (i=1K) , hi(w)=0 (i=1M)
对偶问题(Dual Problem)
定义:

x是前面的w,α是一个K维的向量,β是一个M维的向量。
拉格朗日对偶问题是运筹学基础知识。*(KKT条件求解、拉格朗日传乘数法、弱对偶性定理)*
对偶问题定义:
max:
 (inf:求最小值)
(inf:求最小值)s.t. : λ
i≥ 0 (i=1~K)
这里可以去看《Convex optimization》前150页内容,学习推导过程。
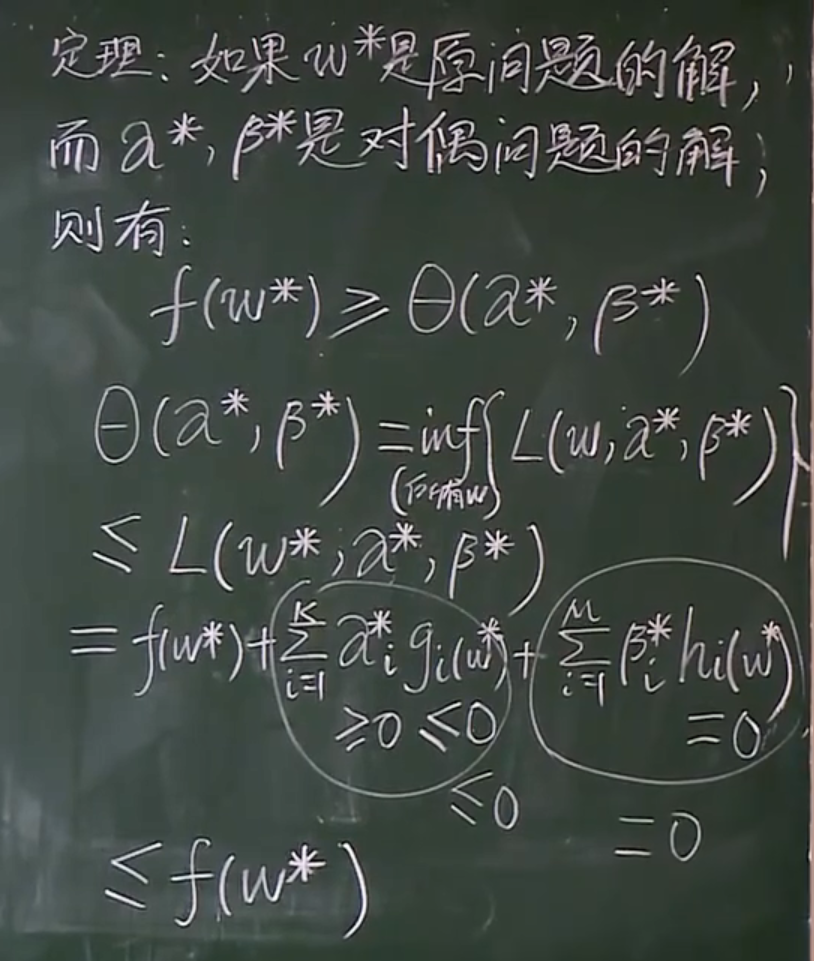
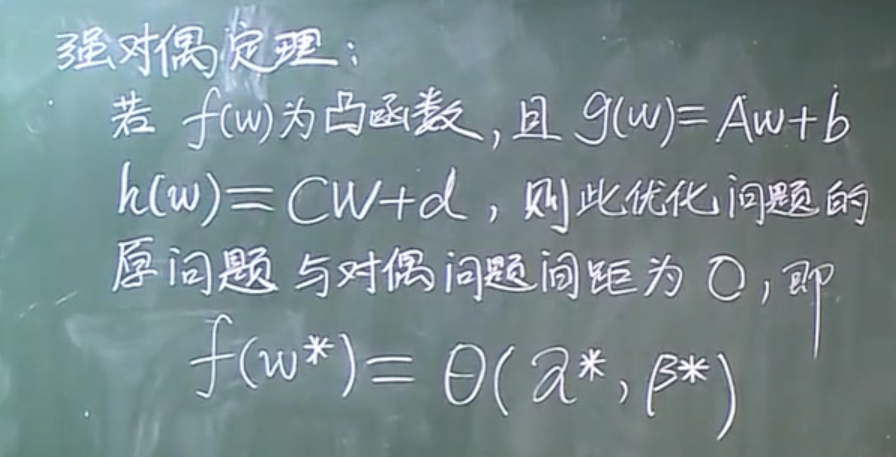
结论可推出:
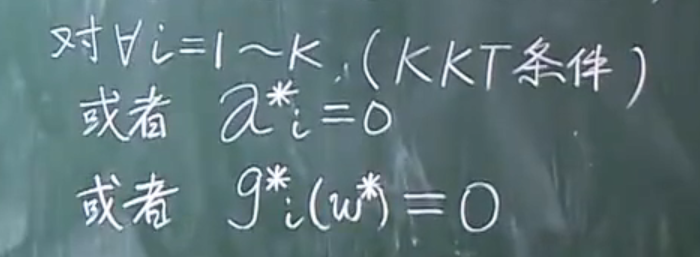
支持向量机原问题转化为对偶问题==(重点复习)==
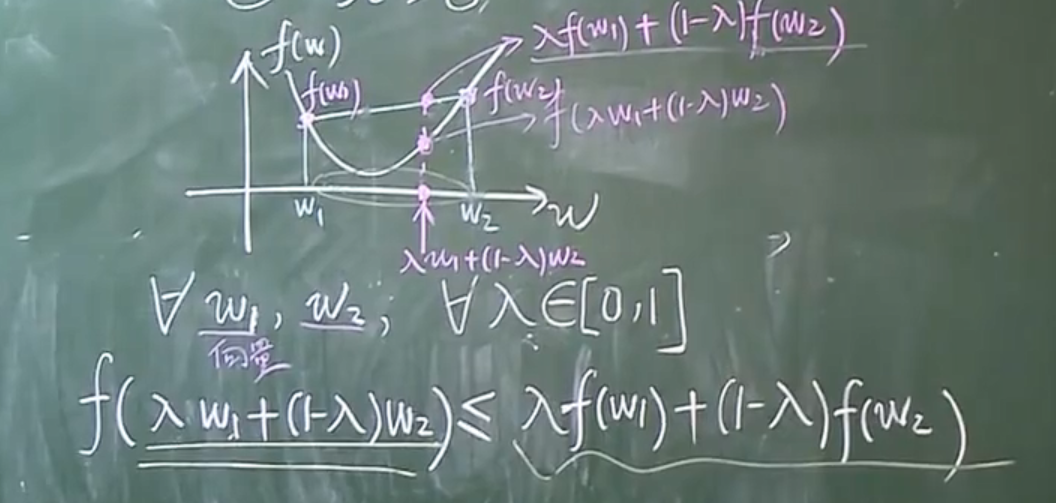
凸函数的定义。w可能是高维向量,这个代数表达在高维依然适用。
原问题证明建议重看p12-23:37
支持向量机的应用——兵王问题
n折交叉验证
对于每一组超参数,进行n折交叉验证求损失,最终选取的是损失最小的那一组超参数。
测试结果中的支持向量
当支持向量占比非常高,甚至是几乎等于训练样本。则表明这次训练失败,或者数据集本身没有规律,或者SVM 没法找到他的规律。
评判模型好坏
混淆矩阵
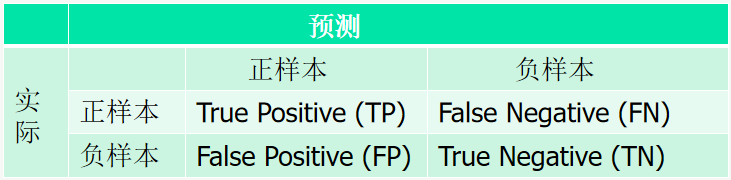
TP: 将正样本识别为正样本的数量(或概率)
FN: 将正样本识别为负样本的数量(或概率)
FP: 将负样本识别为正样本的数量(或概率)
TN: 将负样本识别为负样本的数量(或概率)
FN减少 <=> TP增加 <=> FP增加 <=> TN减少
mAP: mean Average Precision, 即各类别AP的平均值
AP: PR曲线下面积,后文会详细讲解
PR曲线: Precision-Recall曲线
Precision: TP / (TP + FP)
Recall: TP / (TP + FN)
TP: IoU>0.5的检测框数量(同一Ground Truth只计算一次)
FP: IoU<=0.5的检测框,或者是检测到同一个GT的多余检测框的数量
FN: 没有检测到的GT的数量
ROC曲线(Receiver Operating Character)
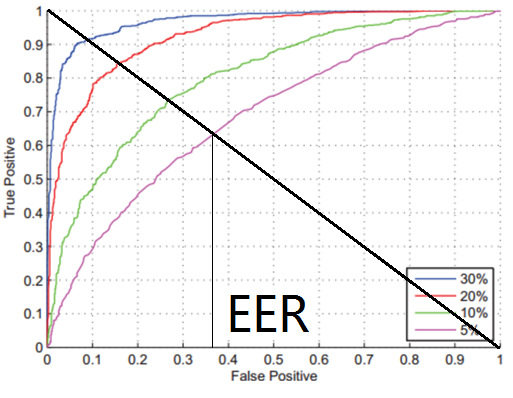
四条线表示四个不同的系统
等错误率 (Equal Error Rate, EER)是两类错误FP和FN相等时候的错误率,这时错误率越小,表示系统性能约好。
AUC(Area Under Curve)曲线右下角的一块面积,面积的大小也能体现模型的好坏。
判别模型的好坏要看具体的应用,并不是准确率越高,模型高就越好
兵王问题的Python实现==(补充)==
1 |
处理多分类问题
- 改造优化的目标函数和限制条件,使之能处理多类
论文 SVM-Multiclass Multi-class Support Vector Machine - 一类 VS 其他类
- 一类 VS 另一类
其中,①方法通常不是很好,因为SVM是针对二分类问题开发的。
在n类问题分类中,②方法主要构造n个SVM,③方法要构造 n * (n-1) / 2 个SVM。
通常来说,③方法分类噢效果更好,但是也更复杂。